

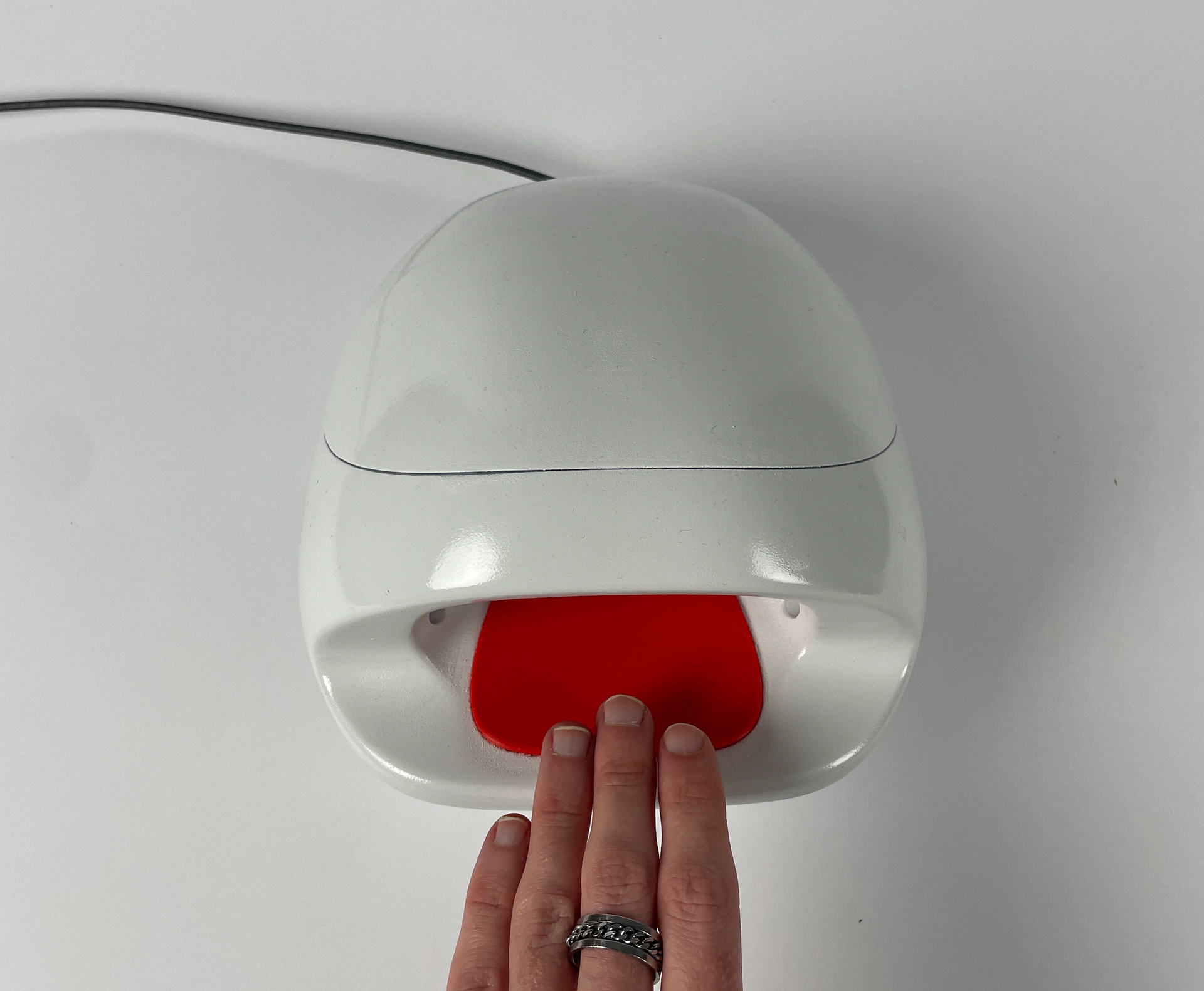
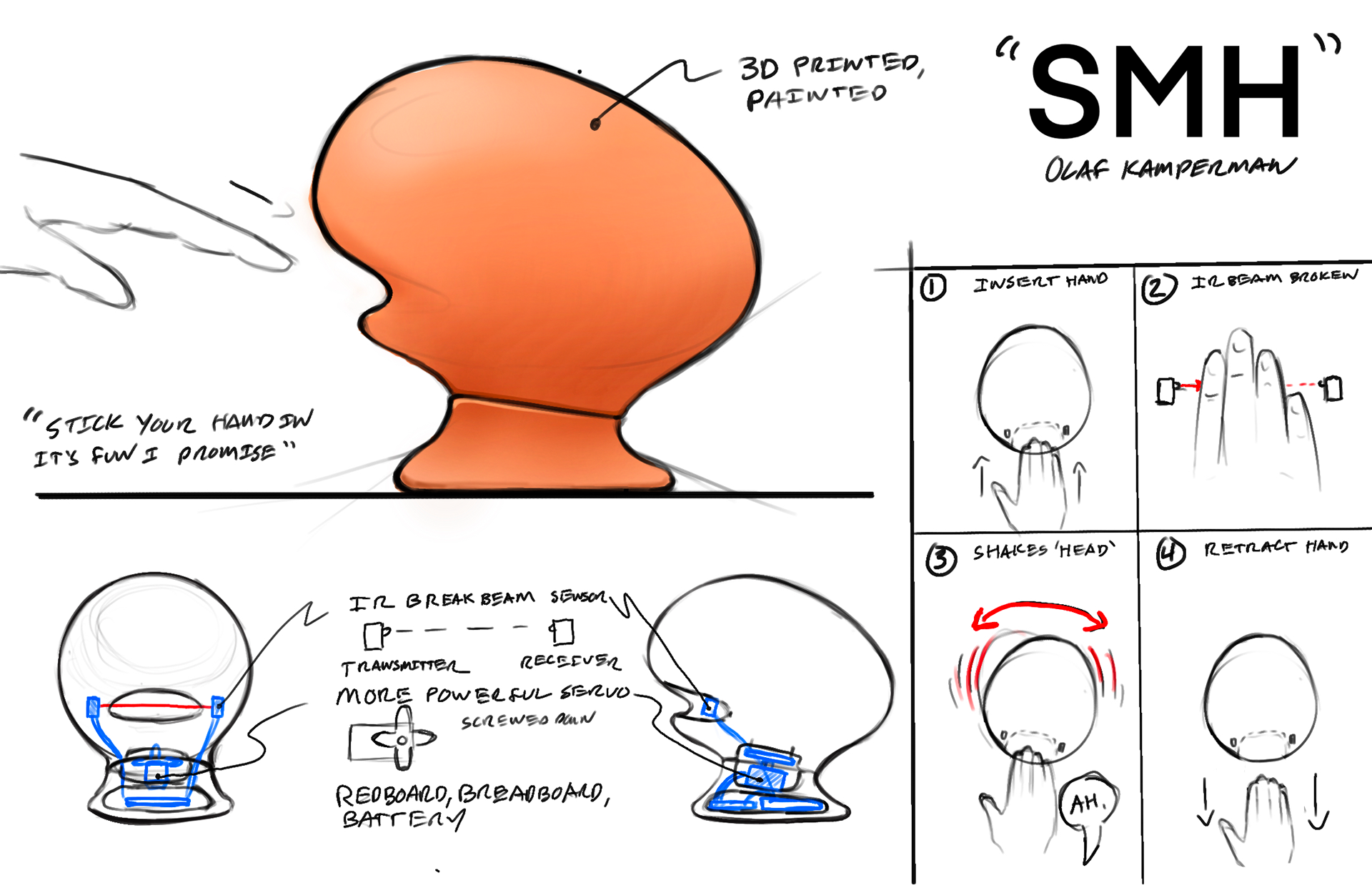
Smh is an interactive object that you really shouldn't put your hand in. I mean look at it, it definitely wants to eat you or something, right? But go ahead, put your hand on its inviting red tongue, I'm sure it'll be fine!
Prompt: "Objects of Interactive Nonsense", to make a tabletop object with one emotionally compelling and interesting interaction (3 weeks)
Made for ID 3052 Interactive Product Design Studio
Turns out it didn't like you!
smh surprises the user with its disapproval of them. The form draws on mental models of cartoon animals and gel nail-curing machines, leading people to want to put their hand on the bright red pad, but being a bit unsettled at the same time. People may not know what will happen to their hand, but the thing certainly seems to want them to place it inside! smh swiftly rejects this notion with a disapproving shake of its 'head'. The timing of the reaction and almost life-like features mean smh often startles even those who know what's coming next.
How it Works


Tower Pro MG995R High Torque Servo Motor
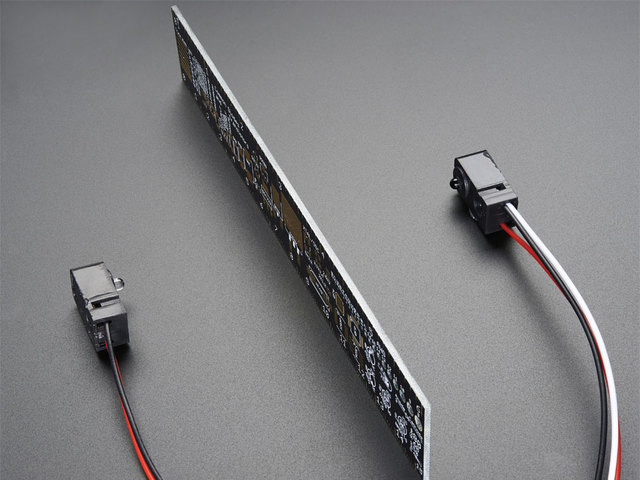
Omron Infrared Breakbeam sensor
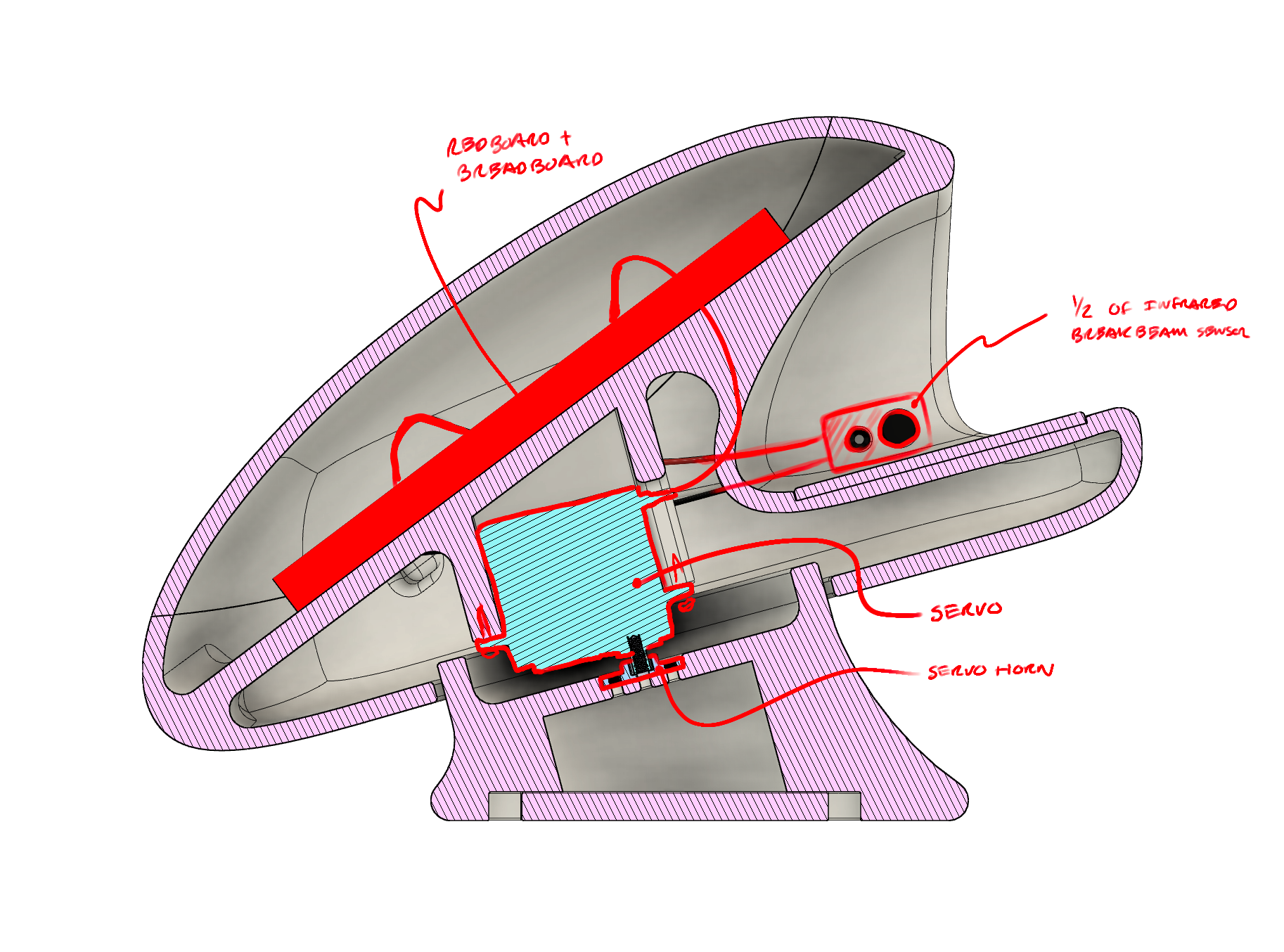
Technologically, smh is relatively simple. The sensing is done using an infrared breakbeam sensor, which uses a transmitter end and a receiver end to create a beam which can be broken by a hand/other object. Once smh senses that the beam is broken, it runs code that tells the high-torque servo to rotate back and forth between 40 and 140 degrees (starting at 90). It is programmed to randomly choose which way it rotates first, making it feel more alive (seen in video below). The code runs on a RedBoard and a breadboard. Two views of the electronic assemblies are included above and the individual components to the left.
Process
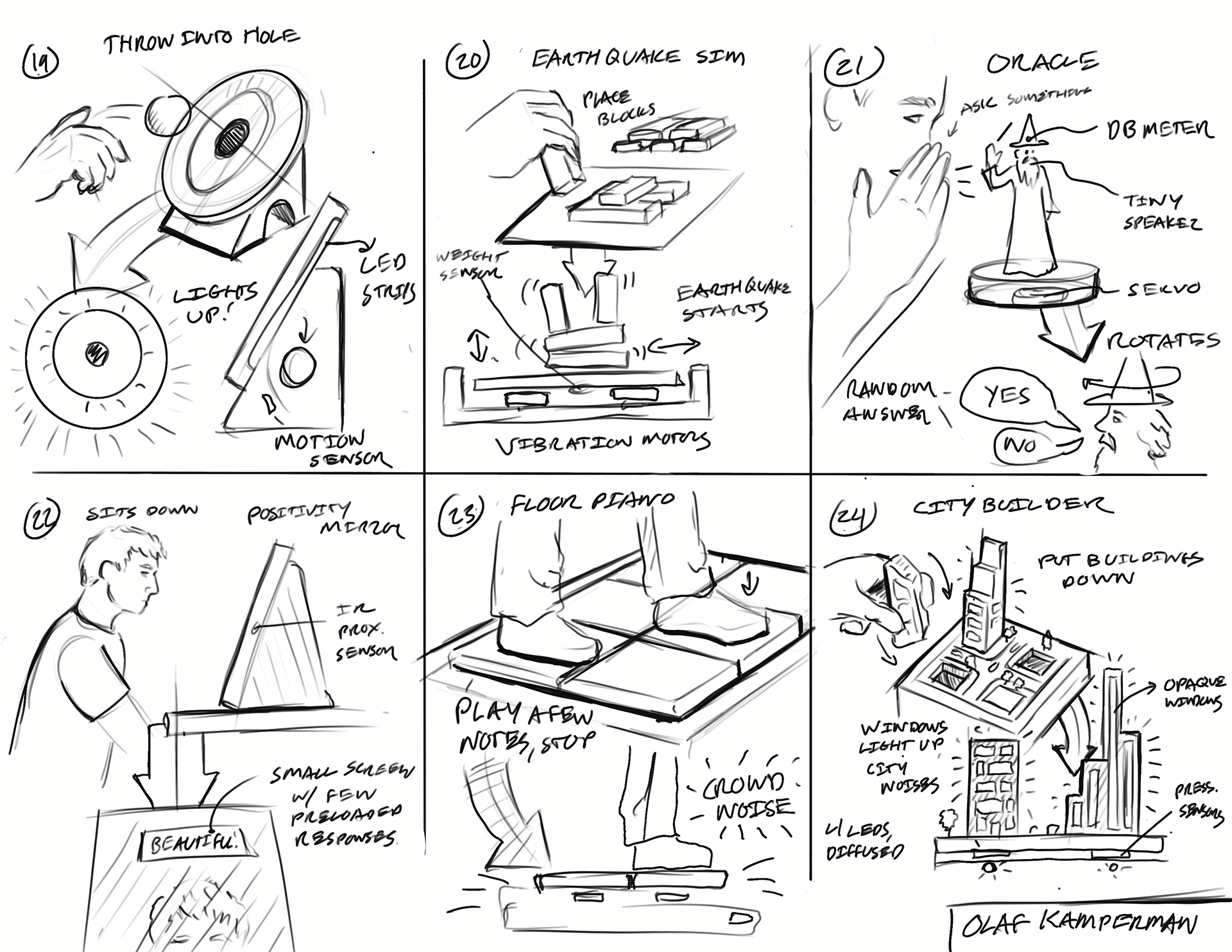
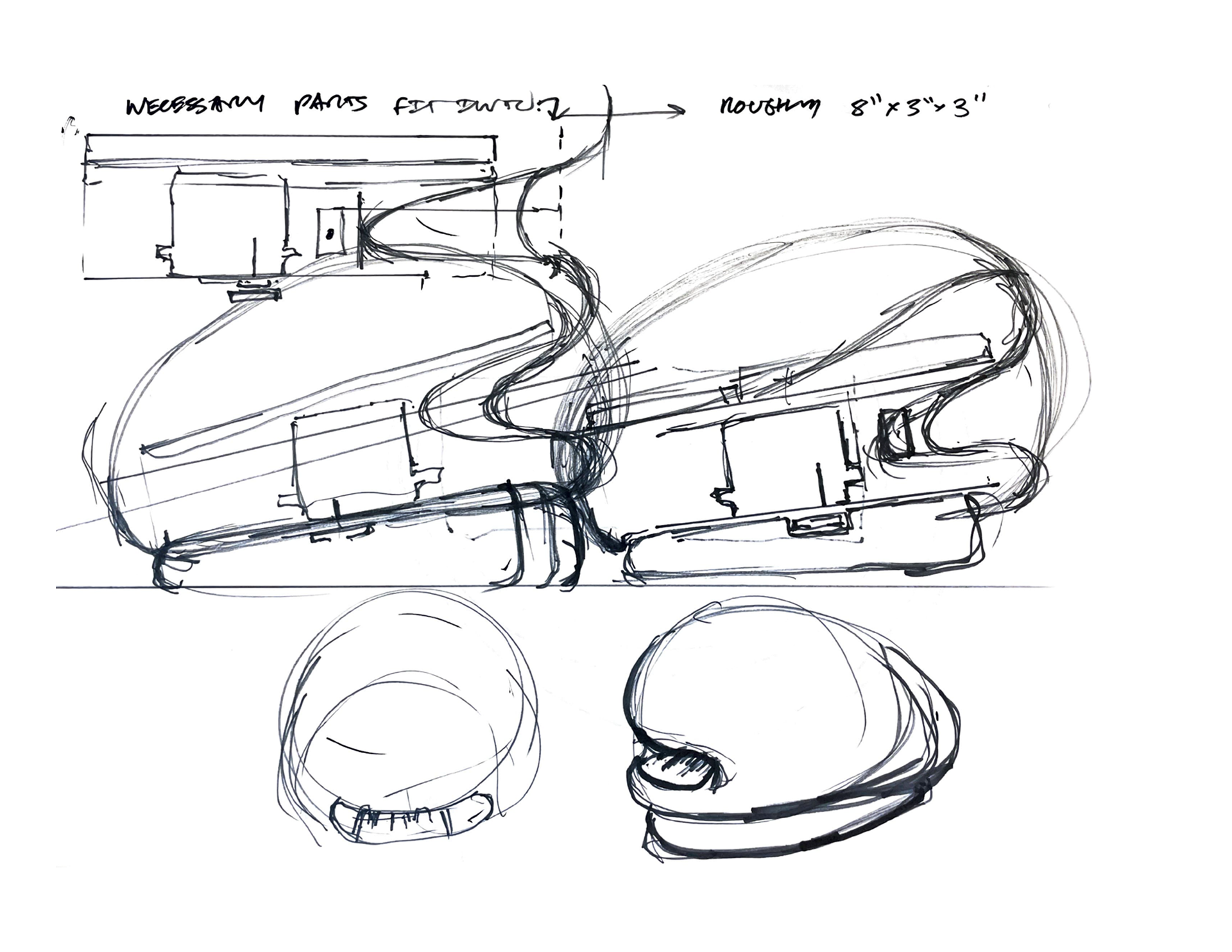
I started by sketching 30 ideas for objects of interactive nonsense, exploring all kinds of interactions through different sensors, actuators, and emotions. I tried to sketch objects that would elicit a strong reaction, and made sure to consider how they would work.
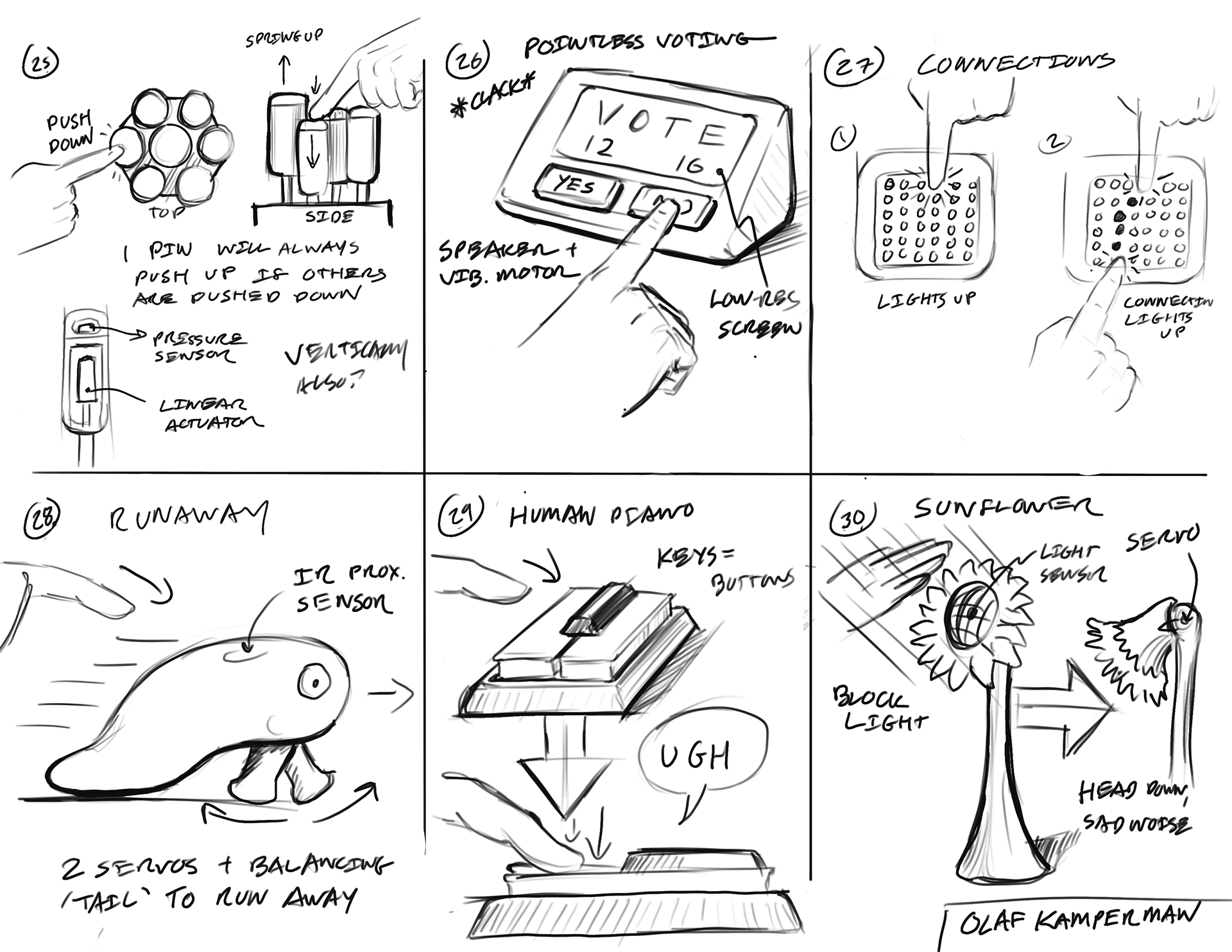
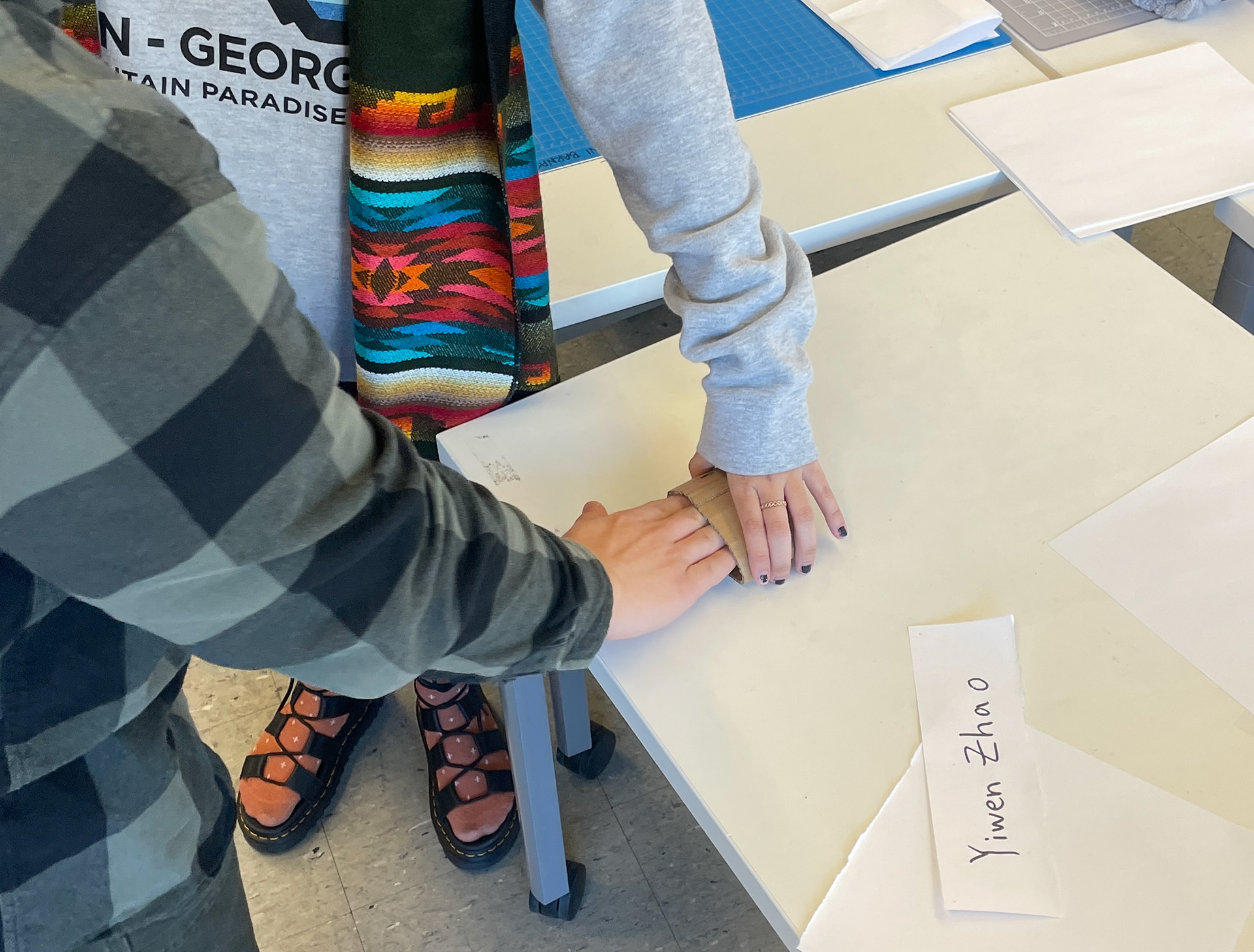
I got a positive reaction from my studio-mates who I presented these to on #5, 'the tickler' because they had a strong mental model of it looking like a nail-curing machine. That led me to run with the general inviting, organic form, but I wasn't sure what exactly it should do once a hand is stuck in. Among the options I considered were pushing the hand out, tickling, making the hand wet, scooting away, and rotating away. I narrowed it down it rejecting the hand, but had to figure out how to do that in the most compelling way. I tested a few interactions out on people with a cardboard model (right), but none were really generating enough of an emotional response.
Testing 'scooting away' behavior

Testing out IR sensor
First version of 'head-shaking' behavior
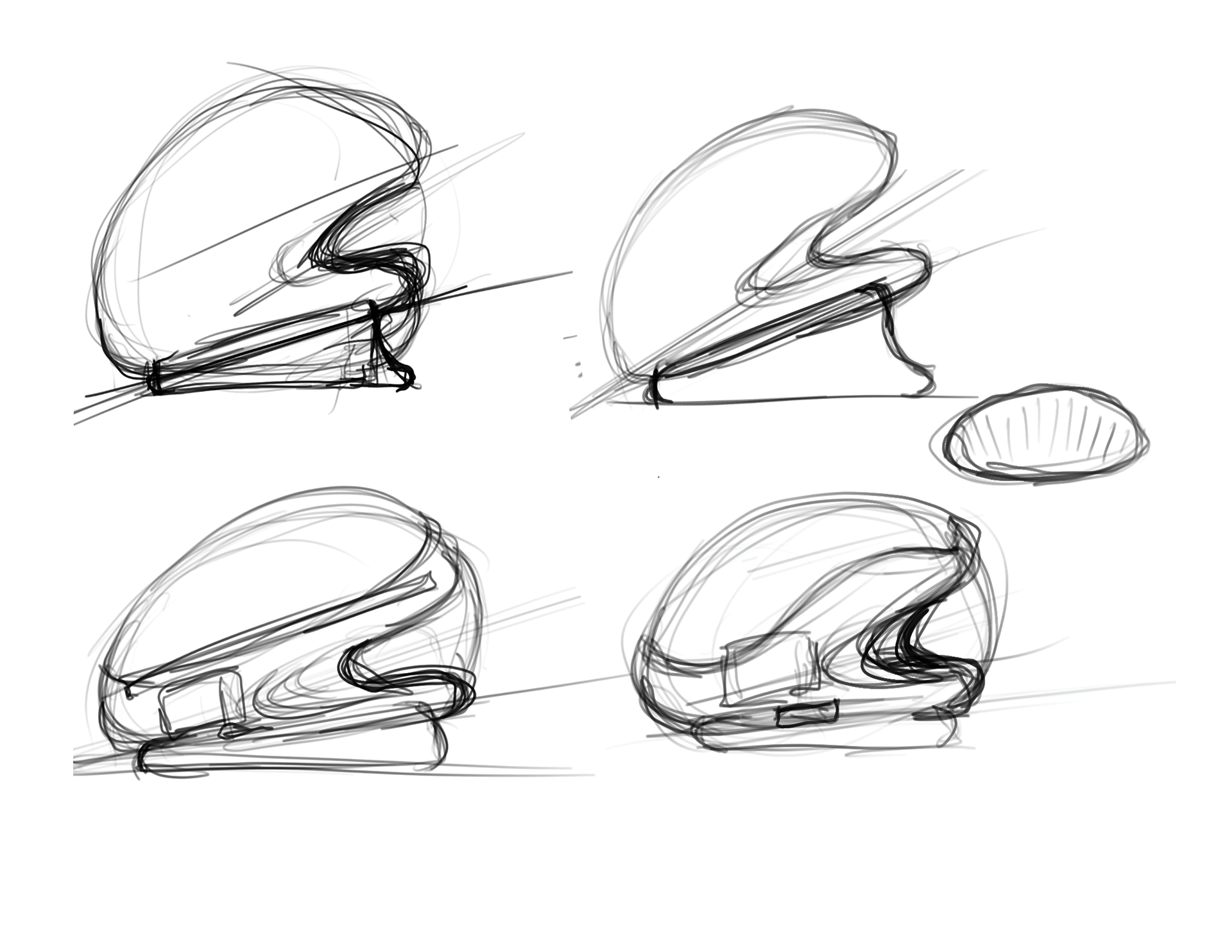
I decided to start testing out my electronics by going with one of the less compelling ideas (tickling) until I found something better. I suddenly realized I could use the servo motion I was planning on using for tickling, but rotate it 90º and make the thing shake its head. This made the interaction more emotionally interesting than tickling or scooting away because of the human-like action, but was simpler to execute than some of the other interactions I was considering like pushing out or moving back then rotating away.
Satisfied with the interaction and general concept after presenting the above concept sketch and simple breadboard model, form development was the main challenge remaining. With the concept drawing I started with something closer to a head than a machine because of the shaking behavior.
Form Development
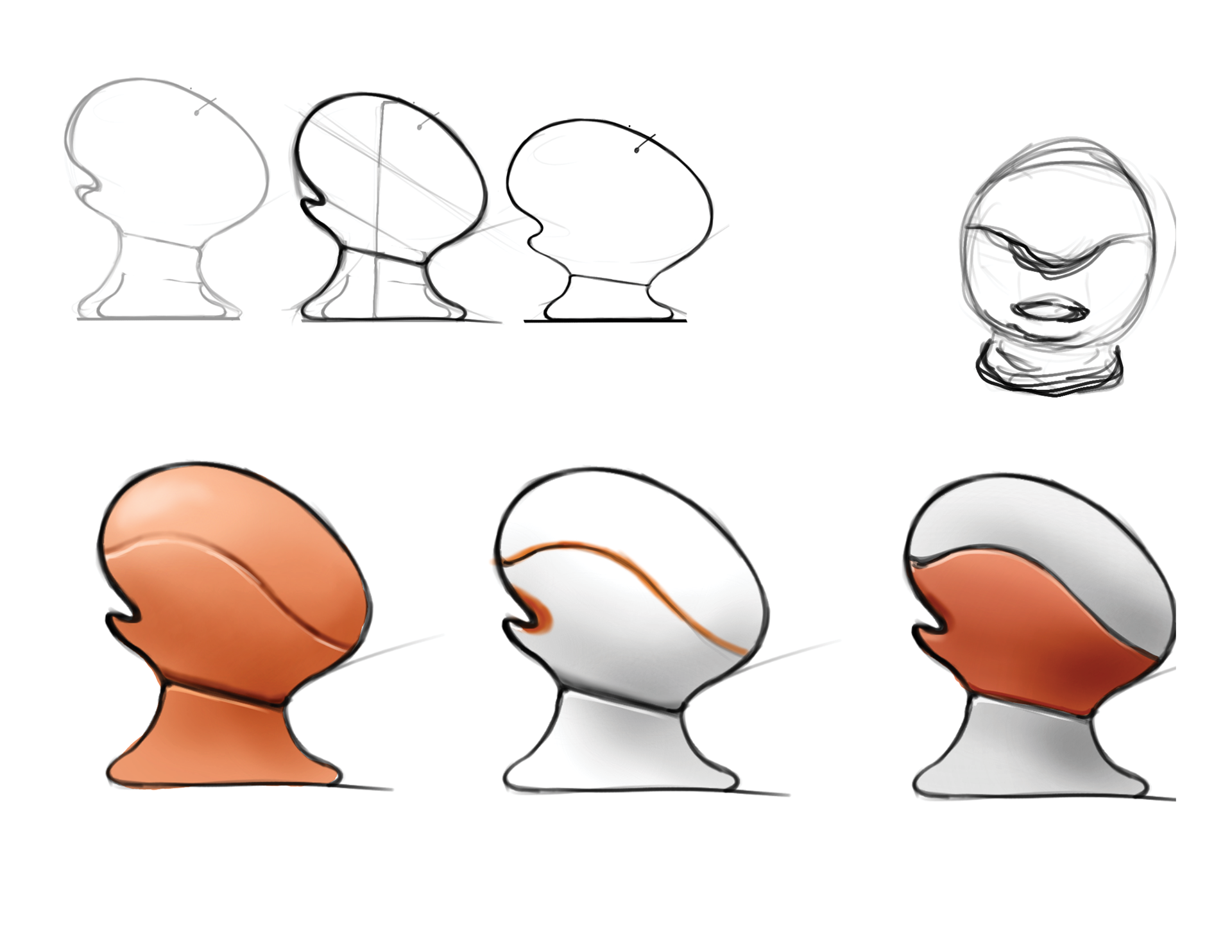

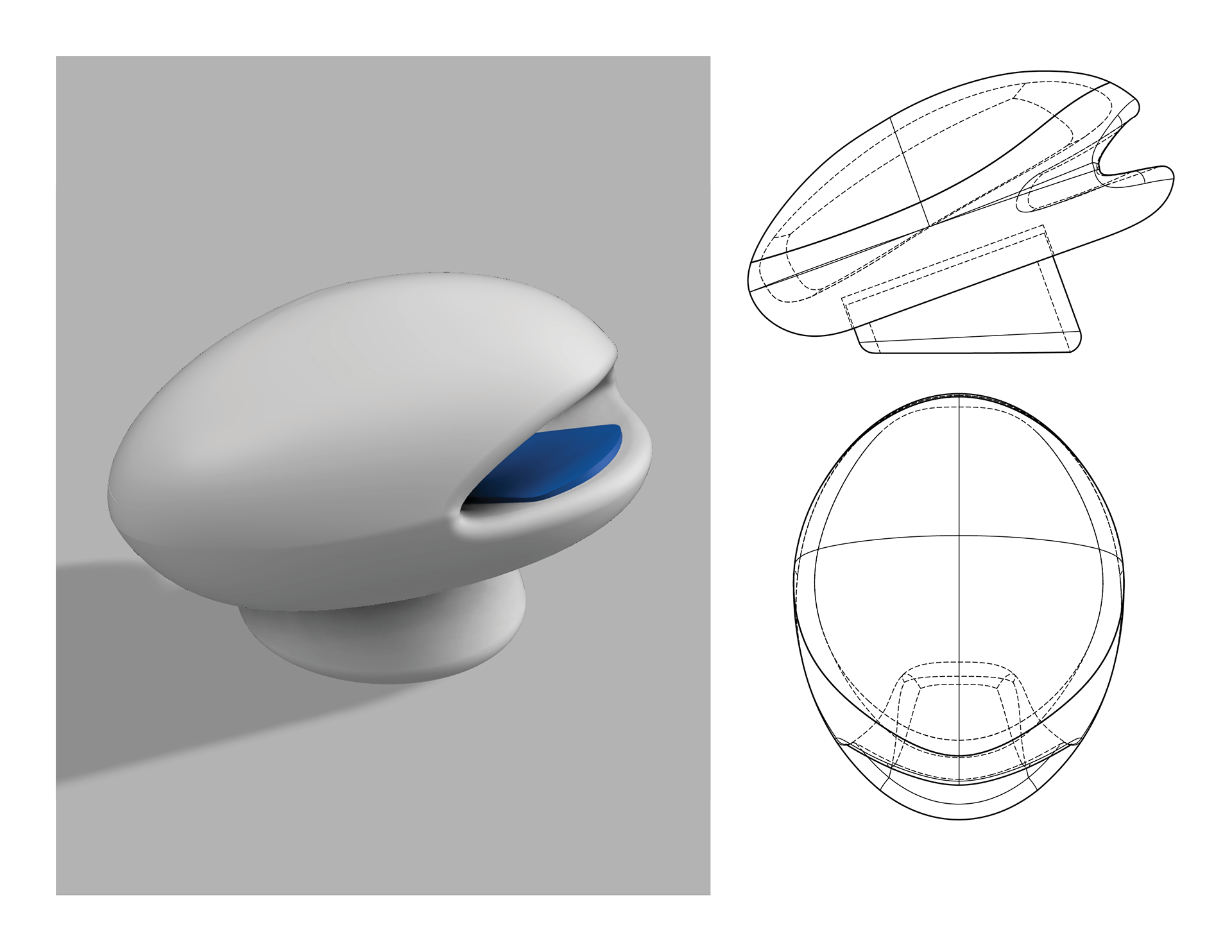
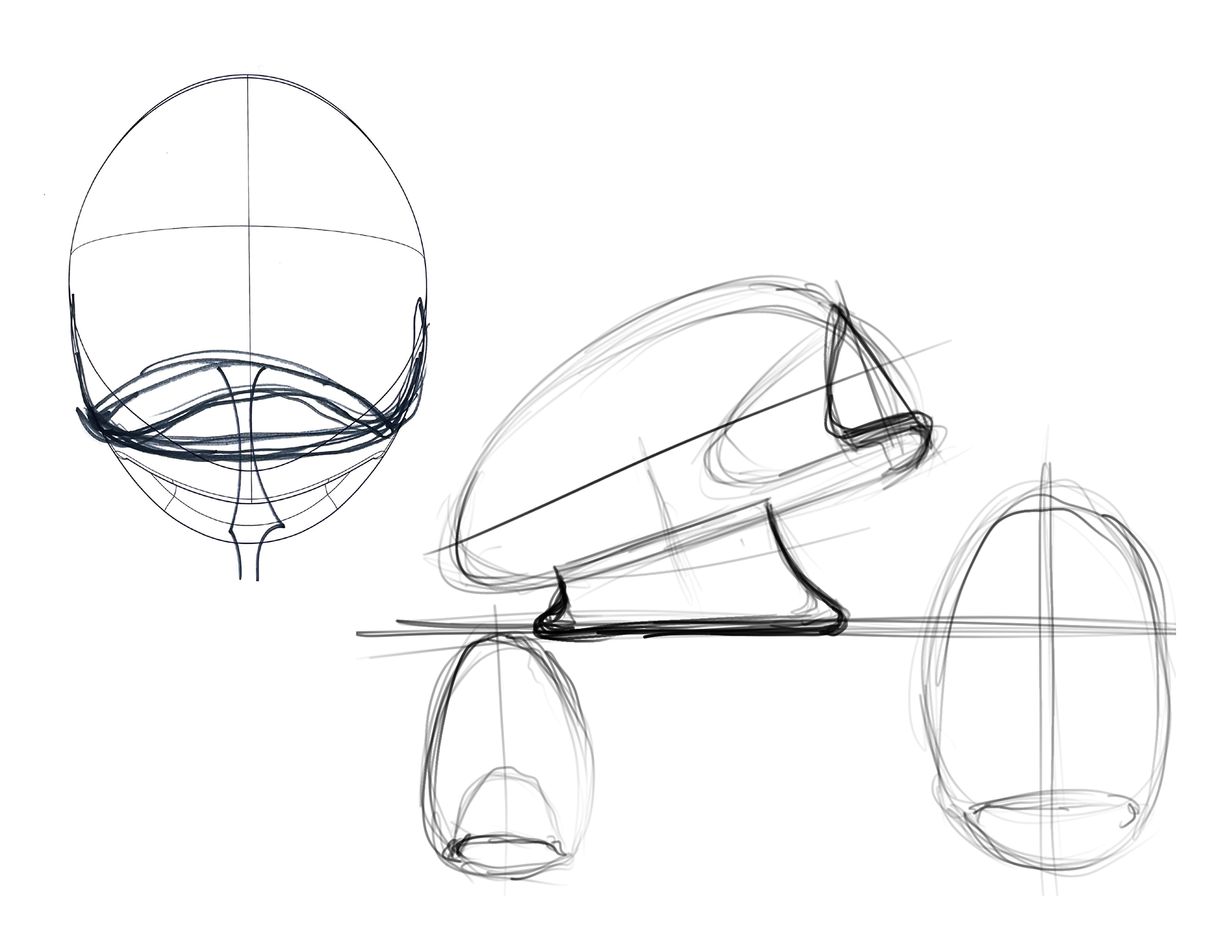
At first I was mostly concerned with the relative weights of the base and head and how high the opening was off the table for comfortable access. With feedback I realized smh was drifting into 'uncanny valley' territory, and people wouldn't want to stick their hands in what essentially looks like a person's mouth. After trying to shift away from the head-like form and drawing around the sizes of my components, it still read too much like a creepy mouth. I went back to studying gel nail-curing machines(right), and noticed they all have a flatter front and taller opening for the hand, which I started exploring in the last set of sketches above.




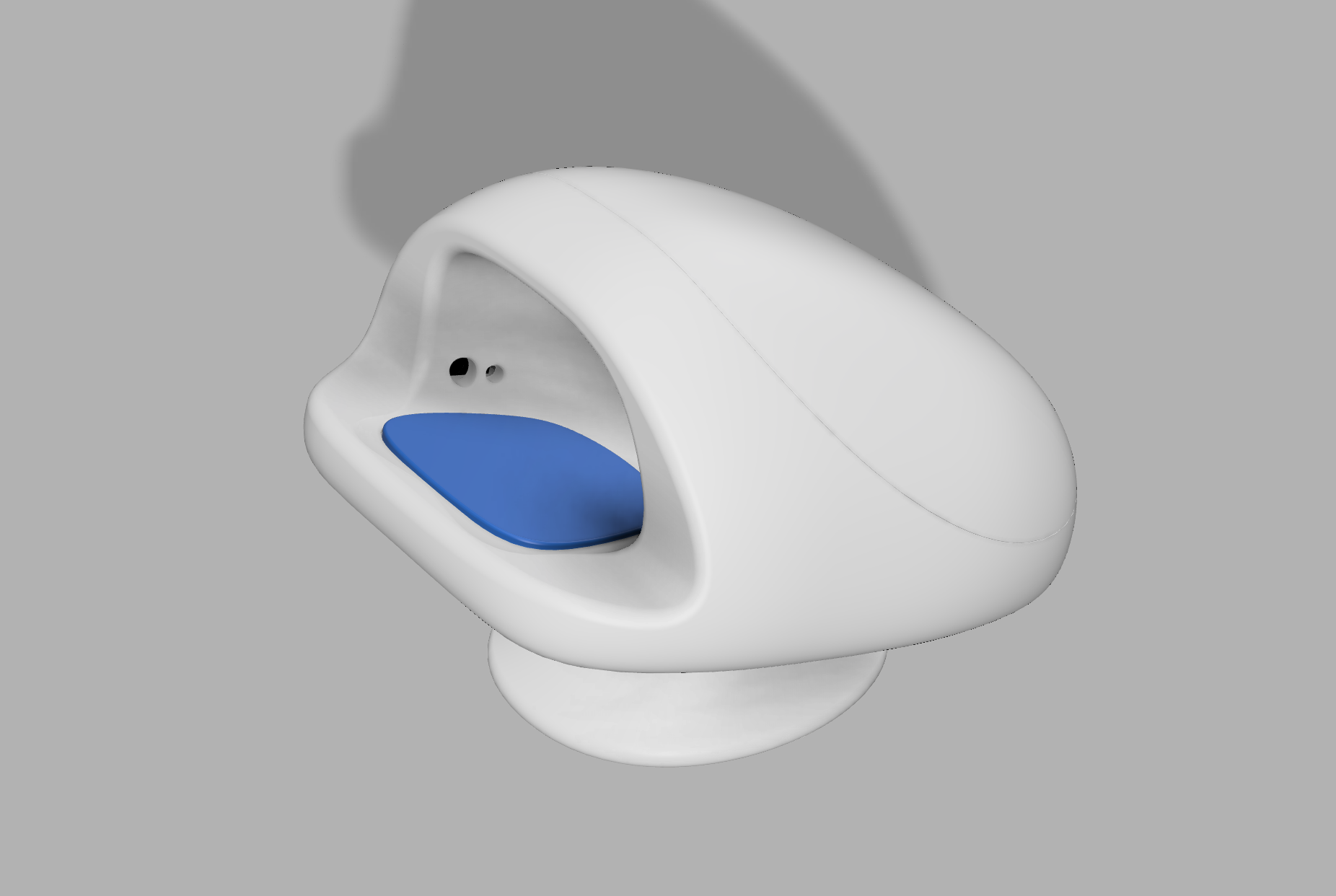

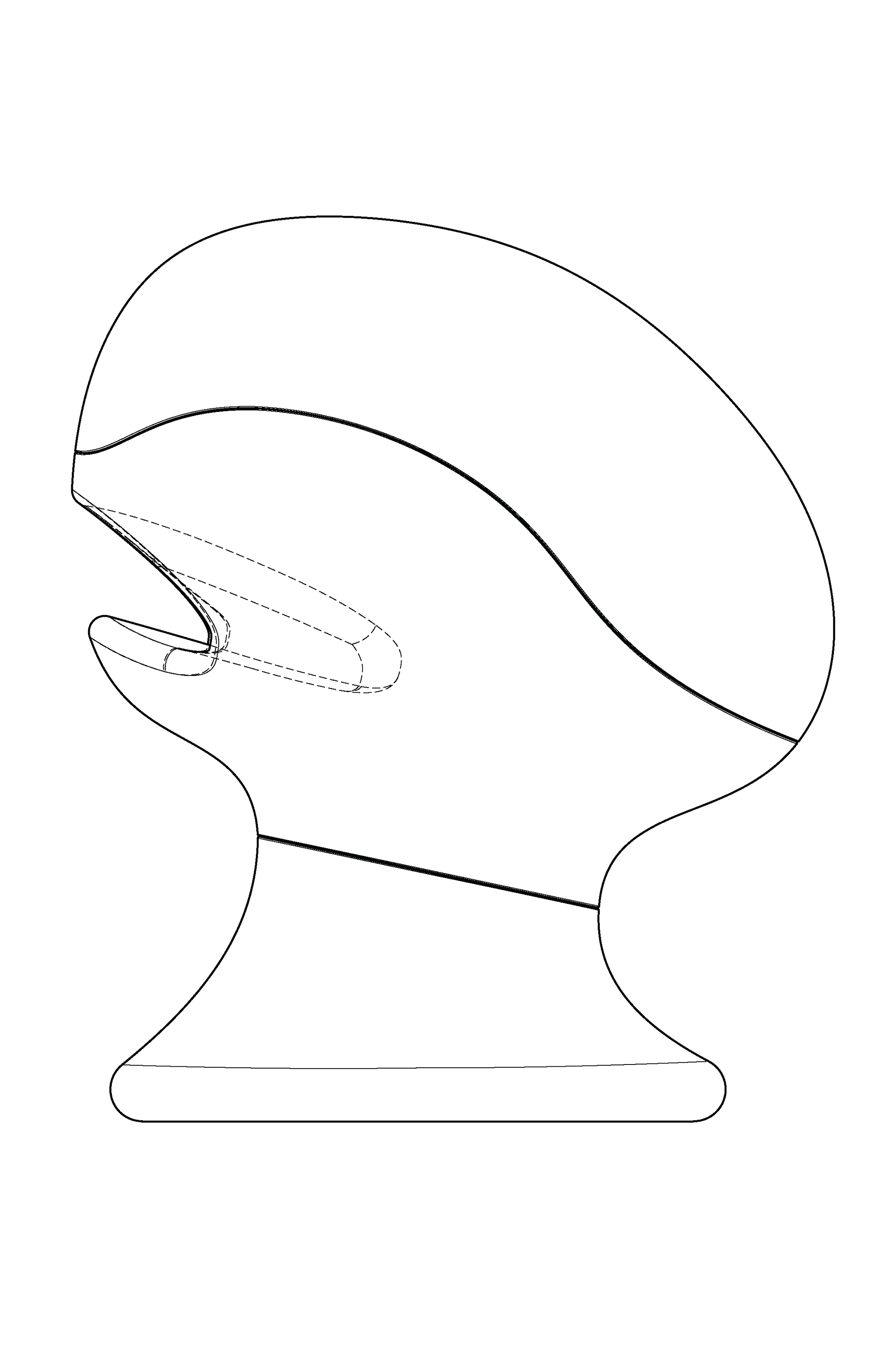
After deciding on that flattened, more machine-like form, I quickly went into CAD. Using Fusion360 I modeled smh to be 3D printed, integrating the components based off earlier drawings and measurements, resulting in the above.
Assembly + Finishing

I first used the raw prints to test how the electronics fit and create an integrated prototype to validate my choices about form and behavior. People reacted well to the form and color of smh, so I chose to move forward with finishing the prints to a high degree of fidelity. Some subtle refining of the interaction still remained to be done regarding the speed and variation of the behavior.

Sanding

Fully sanded and glued

Painted

Rubber feet to prevent slipping
Final Presentation



Having finished and painted everything nicely, along with refining the interaction by decreasing the delay and adding a random start direction, I was ready to present, setting smh on a long table alongside everyone else's projects. Smh mostly got the intended reaction, with almost everyone wanting to stick their hand in and being startled at smh's disapproval. Even people who had used it before or came back for a second try were still caught off guard by the timing of the reaction. Smh worked reliably and thankfully didn't scoot off the table.